Designer, Roboticist, Woodworker
test

Hi, I'm Forest!
I am currently a Master's Student studying Robotics and Autonomous Systems at Boston University. My passion is designing and creating, especially in the robotics field. Being able to put your thoughts and feelings into something that can move is the greatest feeling ever. Right now, my goal in life is to improve to the point where I can be truly proud of something that I have built.
When I'm not designing and building, I enjoy running (sometimes), hanging out with friends (sometimes), and eating good food.
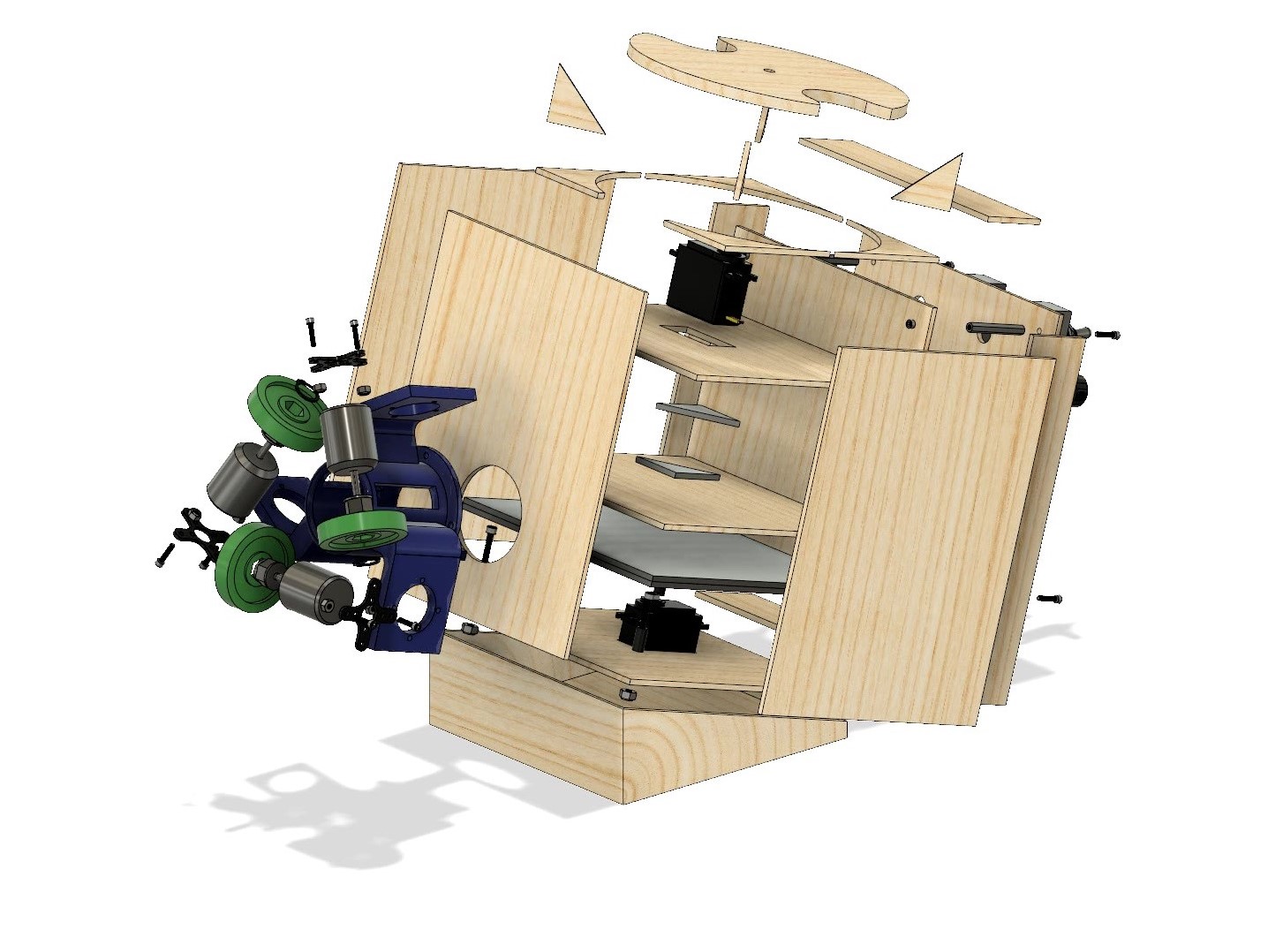
Chucky
Chucky is a self serving table tennis robot that I designed and built on my own. It utilizes three brushless dc motors and flywheel design to general all types of spin. The parts were all designed in Autodesk Fusion 360, then either 3d printed or laser cut. Future goals include trying to make both hardware and software plans open source, to allow many others to design their own cheap table tennis robot.
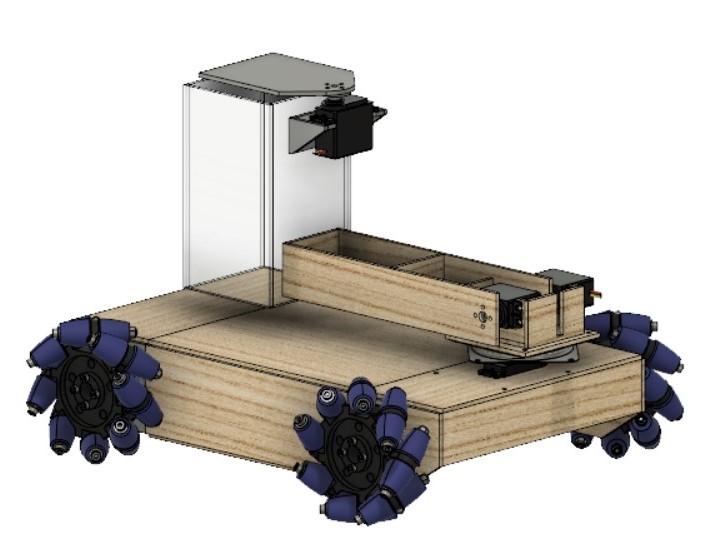
Iroh
Iroh is an omnidirectional robot that runs on self designed mecanum wheels. The goal of Iroh is to design a seeing eye robot: using vision technology along with ultrasonic sensors, Iroh will be able to guide those that are visually impaired to various places, much like a seeing eye dog. The second iteration of the robot is currently in development.
LivingWaters
I had the opportunity to help out the Rutgers Hult prize team, LivingWaters, with their design for their project. The goal of the project was to be able to collect water efficiently. I was given the opportunity to design a model of their design and perform fluid analysis in Autodesk 3ds Max to demonstrate the feasibility of their idea.