Chucky
the table tennis robot
What is this thing?
Chucky is a self designed and built table tennis serving robot. It can hold up to 50 table tennis balls at a time and serve them one by one with 4 different types of spin: top spin, back spin, side spin, and no spin.
The goal of this project was to make a table tennis robot that is easily transportable (it can fit in a backpack), is affordable, and can be easily built so others can replicate and build one on their own.
Ideation and Pre-planning
For a long time, I enjoyed playing table tennis, whether it was a basement showdown during parties or practice during club at university. However, it was definitely difficult to practice a lot of the time, especially on my own. Unlike a sport such as basketball, table tennis requires a partner. Realizing that I wouldn't always have someone to train with, I wanted to create something that would allow me to practice on my own.
After doing research on my own, I decided to build my own self serving table tennis robot. A self serving robot would feed balls into a flywheel and generate spin, allowing me to practice a variety of shots.
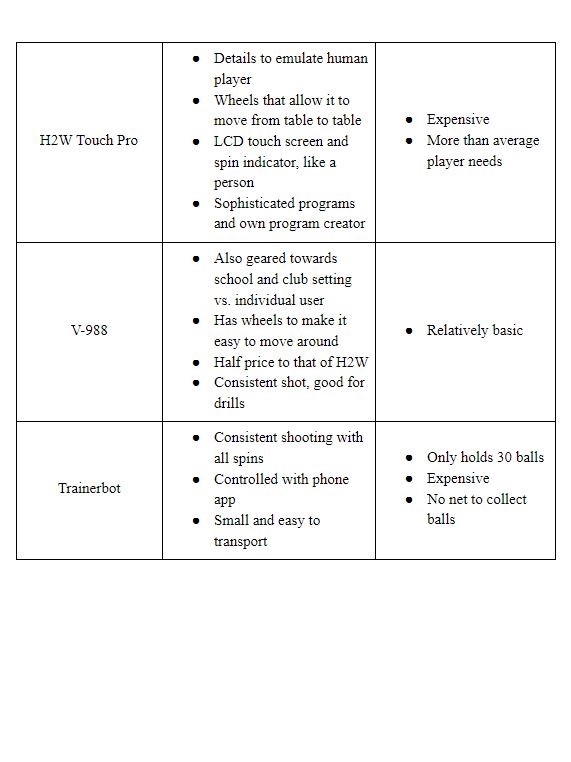
Furthermore, I wanted to investigate the current market to see different designs, prices, and capabilities of table tennis robots. Based on this research, I tweeked the criteria of what I wanted my table tennis robot to accomplish.
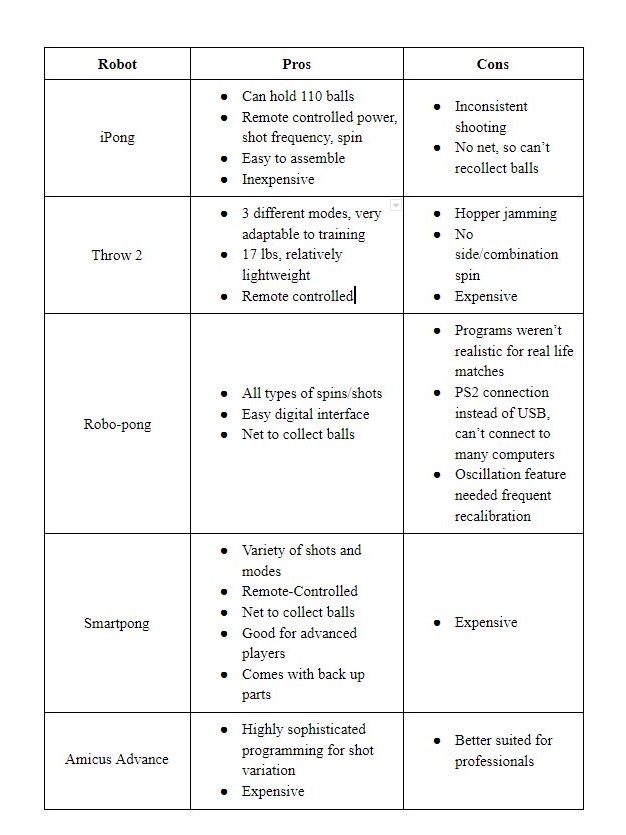
Research Findings
Taking into account the various robots on the market, a table tennis robot needs a variety of features to be viable and additional features to flourish. To be successful a table tennis robot needs:
- Consistent shooting
- To hold enough balls to for adequate training
If these requirements are not fulfilled, the robot just ends up being more work. There are a number of other features that make a table tennis robot excel. Through this research, I believe the most important ones are:
- Transportability
- Programming
- Human emulation
Transportability is key for encouraging users to use this robot frequently and make it simple and easy to use wherever, be it at a table tennis club or home. Programming also is crucial to an effective robot. Being able to create practice plans and control the robot remotely will make practice a lot more efficient and player friendly. Lastly, human emulation is also important, something that many current robots lack. The feel of playing a person is simply vastly different from practicing against a static shooter. Encapsulating these features will be important when robot design is considered.
Designing before Building: Following the Engineering Design Process
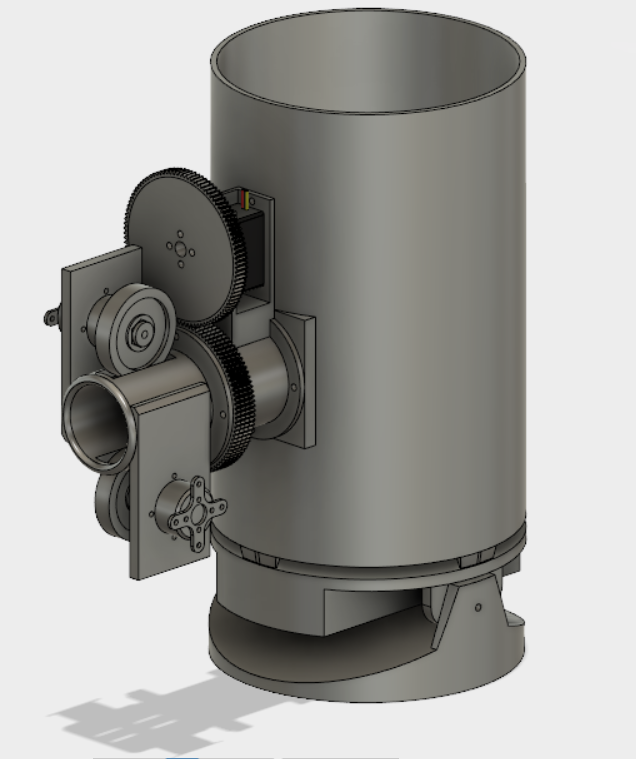
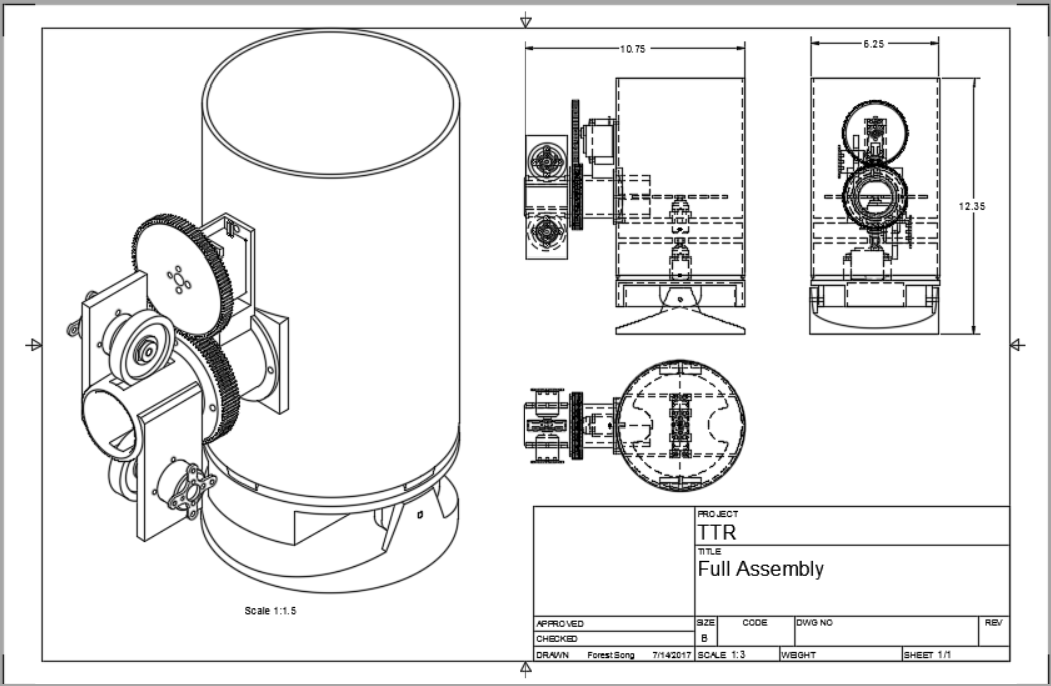
If there is anything that I have learned from this project, it is the importance of using CAD and designing before building. In order to write a business proposal, a budget needed to be created before the robot could be built. As such, it forced me to design the entire robot beforehand in CAD without building. Designing it in CAD also allowed me to utilize 3D printing at our university's makerspace to accurately design parts and visualize my design before construting it.
The design consisted of 6 main parts: The shooter, the shooter swivel, the hopper, the feeder, the base swivel, and the angler.
Compliation of Research and Design
In order to recieve funding for this project, I wrote up a business proposal that detailed what the project entailed of, the process that I took towards designing it, and a rough budget of how much it would cost. I then sent it to various sources at my university, and was rejected quickly. Although I wasn't able to recieve funding, I still found the proposal helpful towards improving my writing skills and forcing me to design and plan much of the project out before actually building it.
Research Findings
After designing the model in CAD, the design was constructed out of foamcore in order to rapidly prototype and test. The original plan of 3D printing the design, while much cleaner and exact, was much more costly and had a higher risk of failure. Additionally, the design was changed to include three brushless DC motors rather than two, in order to reduce complexity and space occupancy of the original swivel design. The robot is controlled through and Arduino and powered using 6 Nimh rechargable 1.2V batteries.
Additionally, I was given the opportunity to present at Rutgers Day, a university wide event that is open to the public. Thousands of people in the New Jersey Area travel to Rutgers to look at different projects going on at the university. I was lucky enough to be able to present and test my model. Below is a picture of me demonstrating it and letting people try it out! I had a ton of fun and was really suprised by the sheer number of people that enjoyed trying it out. From this demo I learned about a ton of improvements that I should make, a few of them being: durability, better power source, cleaner electronics, more streamline design, etc.



Design and Future Goals
The final iteration of the table tennis robot was similarly designed in Autodesk Fusion 360 and laser cut out of 1/8" plywood. Additionally, the electronics were enclosed in a box on the back of the feeder's frame. This also allowed for various switches and potentiometers to be added for manual control of each of the motors, feeder rate, and power. Chucky now runs on a 12V power supply instead of rechargable batteries, in order to ensure that one can play for longer periods of time without worrying about motors slowing down.
I plan to eventually come back to this project, probably some time this year; I plan to redesign the main frame to make it more space efficient, allow for control through a phone app, and choose parts that will make Chucky even cheaper and more affordable.